
NavIT

Navit is a open source (GPL) car navigation system with routing engine.
It's modular design is capable of using vector maps of various formats for routing and rendering of the displayed map. It's even possible to use multiple maps at a time.
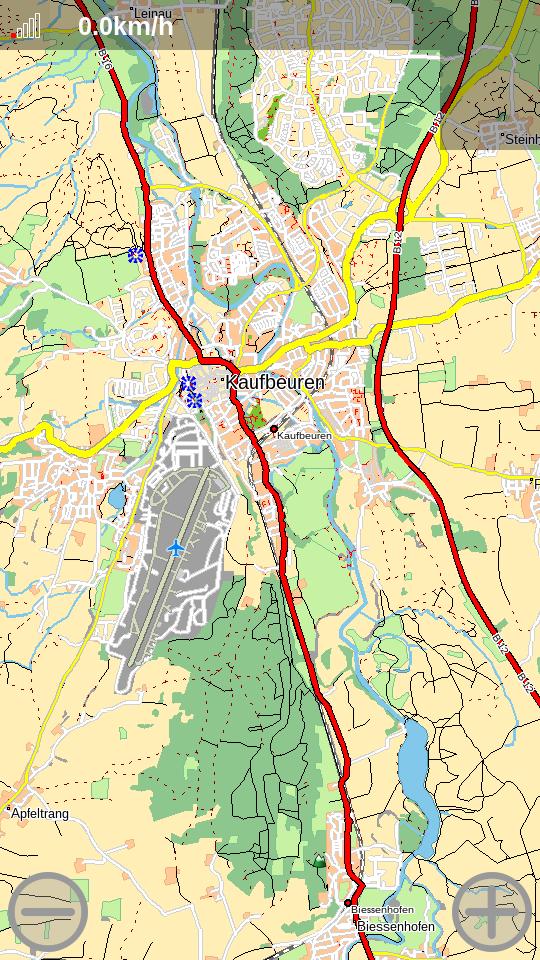
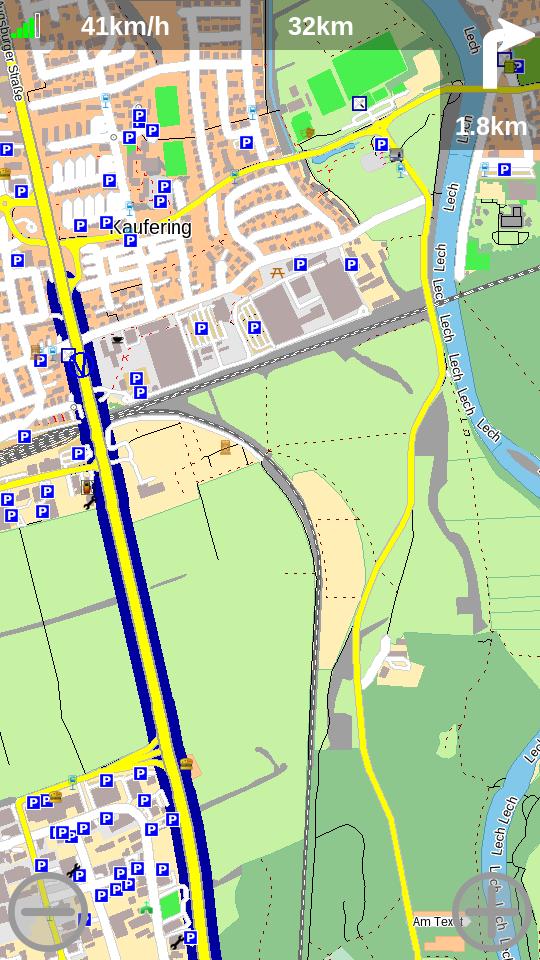
The user interface is designed to work well with touch screen displays. Points of Interest of various formats are displayed on the map.
The current vehicle position is read from gps
The routing engine not only calculates an optimal route to your destination, but also generates directions and even speaks to you.
Navit currently speaks over 70 languages!
For help or more information, please refer to the wiki : http://wiki.navit-project.org
Maps:
The best navigation system is useless without maps. While others are known to work too, the simplest solution is to use OpenStreetMaps by downloading prepared map from the navit planet extractor.
This release is preconfigured to expect a map file at /home/nemo/Documents/map.navit.bin
Older releases up to verion 0.5.6-1 were preconfigured to expect a map file at /home/nemo/Maps/map.navit.bin instead. Move map to newer locatuin if upgrading.
Routing algorithm
NavIt uses a Dijkstra algorithm for routing. The routing starts at the destination by assigning a value to each point directly connected to destination point. The value represents the estimated time needed to pass this distance.
Now the point with the lowest value is choosen using the Fibonacci heap and a value is assigned to connected points whos are unevaluated or whos current value ist greater than the new one.
The search is repeated until the origin is found.
Once the origin is reached, all that needs to be done is to follow the points with the lowest values to the destination.
User configuration
Navit can be fully customized by copying and editing some xml files. Up to version 0.6.6-1, the user configuration directory was configured to be /home/nemo/.navit/ . Due to sandboxing requirements this was changed to be /home/nemo/.config/org.navitproject/navit . The default configuration is located under /usr/share/harbour-navit/ for all versions. Simply copy over the .xml files and start customizing.
Screenshots:
Category:
Keywords:
Application versions:
| Attachment | Size | Date |
|---|---|---|
| 4.33 MB | 08/05/2017 - 14:14 | |
| 4.36 MB | 08/05/2017 - 14:22 | |
| 4.92 MB | 21/06/2017 - 23:50 | |
| 4.95 MB | 21/06/2017 - 23:50 | |
| 5.43 MB | 02/10/2018 - 01:04 | |
| 5.46 MB | 02/10/2018 - 01:04 | |
| 5.47 MB | 29/04/2021 - 17:15 | |
| 5.49 MB | 24/05/2022 - 16:50 | |
| 5.47 MB | 24/05/2022 - 16:50 | |
| 5.66 MB | 04/05/2025 - 22:05 | |
| 5.62 MB | 04/05/2025 - 22:05 | |
| 5.62 MB | 21/02/2026 - 22:42 | |
| 5.69 MB | 21/02/2026 - 22:42 |
Changelog:
Hello Navitters,
Great news: Navit 0.5.7 is out now.
If you want to know what has changed see the Changelog at: https://github.com/navit-gps/navit/blob/v0.5.7/CHANGELOG.md
Please report issues at https://github.com/navit-gps/navit/issues/new/choose
The documentation can be found at https://navit.readthedocs.io/en/trunk/index.html
Happy routing!
Comments
Sheihorath
Sun, 2026/02/22 - 23:31
Permalink
I downloaded the full world map. Where it needs to be copied so that Navit can see it?
metalstrolch
Sun, 2026/02/22 - 23:56
Permalink
This release is preconfigured to expect a map file at /home/nemo/Documents/map.navit.bin
So place your map there.
Sheihorath
Mon, 2026/02/23 - 01:30
Permalink
Thanks for the advice, but the problem is that now there is no nemo user. It is now called defaultuser. I put the map in the home/defaultuser/documents folder, but navit doesn't see it.
metalstrolch
Mon, 2026/03/09 - 22:51
Permalink
My only Sailfish device available has "nemo" as standard user name. If this is "defaultuser" on your device, expect the map at /home/defaultuser/Documents/map.navit.bin
In fact it is configured in /usr/share/harbour-navit/navit.xml to point to ~/Documents/map.navit.bin with ~ expanding to user's home directory as usual. Note the capital "D". If Sailfish changed the user configuration I can only guess having no hardware at hand.
eson
Sun, 2026/02/22 - 02:18
Permalink
Can you please update (or remove) the translations.launchpad link, it is not correct anymore. I can of course still do a GitHub PR.
ilovekiruna
Sat, 2026/02/21 - 20:00
Permalink
Hi @metalstrolch,
we recently released navit 0.5.7. Could you please update the package?
Thanks a lot already in advance.
metalstrolch
Sat, 2026/02/21 - 22:44
Permalink
Updated builds from Upstream project renamed to harbour name scheme. Since I don't have a working Sailfish device any more at the moment I cannot test myseelf. Hopefully the build still works.
ilovekiruna
Mon, 2026/03/09 - 14:43
Permalink
I still have a SFOS device, the C2 phone. You can also find me on github as hoehnp. Maybe we could catch up for testing.
will99
Mon, 2025/06/02 - 18:51
Permalink
Probably due to sandboxing the log files are now missing. Before my gps-logs went to .navit. I assume "navit" does not know where it has write permissions to store the logs. Can the location of the log files be configured or is there a modification of the source necessary?
metalstrolch
Mon, 2025/06/02 - 19:20
Permalink
The ".navit" location was moved to ".config/org.navitproject/navit" due to sandboxing. Maybe your traces are written there as well. Besides you should be able to configre this via the navit.xml file. This was moved as well. Maybe the real issue in your case is that navit won't recognize the altered navit.xml in .navit any more. But this was introduced a while ago already, not specially with the last version.
will99
Sun, 2025/06/08 - 21:35
Permalink
Thanks for your hints. I can confirm traces are not written to ".config/org.navitproject/navit"; maybe due to write limitations. Anyway I didn't know that the "data" attribute in the "log" xml-tag accepts also the full path to an location; but it does. I let it point to: "/home/defaultuser/Documents/navit/Tracks/track_%Y%m%d-%%i.gpx" which seem to be the right place for gpx tracks (for me).
fingus
Thu, 2025/05/15 - 09:41
Permalink
After testing it i have some suggestions for the SailfishOS-Version:
1. The Narrator-Voice speaks into the Audio-Stream (when playing Music). Its not that loud, so you have problems to understand it. A suggestion may be to pause the Music-Player by MPRIS or lower its Volume until the Narrator-Voice has ended its instructions.
2. Landscape rotation works but did it on its own way, SailfishOS still thinks the App runs in Portrait-Mode so switching Apps or receiving Notification-Banner isn't comfortable for example.
3. Even activated, the Map just follow you Side by Side and the Map isn't scrolling contentiously.
These 3 Points prevent it to be a far perfect experience. But anyways thanks for the Work so far!
fingus
Fri, 2025/05/09 - 10:41
Permalink
The link to the NavIT-Planet-Extractor is broken, the correct link is: http://maps6.navit-project.org/
will99
Sat, 2025/04/12 - 01:00
Permalink
Hallo Navitusers, it seems that nobody is using Navit on SFOS 4.6 (any more) or is somebody working on the segmentation fault? What is the alternative to Navit? Especially for cycling I miss it. It used to find the best routes ever.
metalstrolch
Sat, 2025/04/12 - 01:21
Permalink
Hi Will99, I'll try to revive Navit once more for Sailfish 5 next days now that my aged Sony got the update. I can already build with version 5 SDK again, but I get a segfault as well. Removing parts of the OSD from navit.xml made it run again. I'll investigate why it segfaults parsing the OSD items. However this takes some time. Hopefully I can spend some hours during the Easter holidays on that topic. I myself moved to Ubuntu touch since more than a year because of no available Sailfish hardware.
You can track my work and get rpm's to try yourself from github:
https://github.com/navit-gps/navit/tree/ubuntutouch
Don't be confsed by the ubuntutouch name of the branch. This one produces almost runnable images for Sailfish 5 as well.
metalstrolch.
will99
Sun, 2025/04/13 - 14:16
Permalink
Hi metalstrolch, many thanks for your answer and the hint to your branch. I will try that out over the easter holidays. If I get the build process running, I might be able to help with debugging. Anyway I will follow your work.
Regards Wilhelm
metalstrolch
Mon, 2025/04/21 - 21:40
Permalink
@will99, would you mind testing my actual build? It's running well on my Sony Xperia X again. Please drop me a not if this fixes the problem for you. I'll release the image here as well
https://output.circle-artifacts.com/output/job/ba61f481-c781-4ad5-9642-d...
https://output.circle-artifacts.com/output/job/ba61f481-c781-4ad5-9642-d...
will99
Sun, 2025/05/04 - 13:17
Permalink
Sorry, didn't see your post up until now. Yesterday I builded from branch: ubuntutouch, rev: bae9029cf with SailfishOS-5.0.0.62-aarch64. And I must say navit runs very good on my Xperia 10 III. No crashes and runs fast. Do you still want me to test the above mentioned build - with the above supplied information - or is that now unnecessary?
metalstrolch
Sun, 2025/05/04 - 22:08
Permalink
Released working version Sailfish-v0.5.6-3. Thank you for confirmation.
NGC_Ollie
Tue, 2025/05/06 - 00:32
Permalink
Yay, Navit is alive, long live NAVIT! \o/ but i don't get any updat on my Xperia 10 III /o\ Is this just me or my phone?
Edit: I just downloaded it manually and it runs like a sprinter. Nice work! Love it
edp17
Wed, 2024/12/11 - 01:32
Permalink
I am getting that segmentation fault issue that ade reported and the workaround doesn't work. Device: community port Motog7Power (ocean) aarch64 - sfos4.6
metalstrolch
Tue, 2025/04/22 - 08:45
Permalink
Would you mind testing my actual build? It's running well on my Sony Xperia X again. Please drop me a not if this fixes the problem for you. I'll release the image here as well
https://output.circle-artifacts.com/output/job/ba61f481-c781-4ad5-9642-d...
https://output.circle-artifacts.com/output/job/ba61f481-c781-4ad5-9642-d...
edp17
Wed, 2025/05/28 - 20:24
Permalink
Thanks for the fix, it installs now.
How/where from can I download maps? The link mentioned in description doesn't work.
NGC_Ollie
Wed, 2024/08/07 - 12:22
Permalink
Hi, are you still active here? Navit stopped starting on my device and IDK why. If anyone knows where to start I'd provide detailed information.
metalstrolch
Wed, 2024/08/21 - 22:36
Permalink
I've built latest navit using the latest Sailfish SDK 4.6.0.13 hopefully resolving the segfault. However I've run out of usable Sailfish devices right now since my Sony died. So I cannot test the thing any more. I myself are on UBTouch at the moment porting navit there. So gie it a try and report back.
ilovekiruna
Mon, 2024/12/16 - 15:35
Permalink
Hi @metalstrolch,
I assigned myself the ticket on our Github repository. I recently got a new SFOS phone and would try to fix the issue. Could you then upload the new version, in case I manage fixing it?
NGC_Ollie
Sat, 2024/11/23 - 01:08
Permalink
Dear Metastrolch, Thanks for your reply, I'm so sorry, I simply missed your comment. I really would like to test your build, but where can I get it? I didn't find it anywhere, could you please provide a link? And if you are unable to test, I might be able to do so if you have any test cases or so.
ade
Wed, 2024/08/07 - 13:43
Permalink
FYI: I see a SFOS 4.6 bug report here from 2 weeks ago: https://github.com/navit-gps/navit/issues/1268, including a hacky workaround for the issue.
Meminga
Sat, 2022/06/25 - 20:25
Permalink
Thanks a lot for the app. A profile without "Autobahn/Kraftfahrstraße" (probably "express way" in english) for smaller motorbikes or scooter would be cool.
NGC_Ollie
Fri, 2022/05/13 - 00:17
Permalink
Sorry to bother you again, we now have a different problem: it seems that navit lost access to its own folders or to the SD card. I'm unable to get my world map on my external storage working. I guess it is because of the sailjail, but I'm really just guessing since i can access those symlinks by command line and they are working. Also the file manager is unable to find those folders like "~/Maps", "~/.navit" or ".local/share/navit" since the introduction of sailjail. Maybe you can help here? Thanks a lot!
Pages